大家好,欢迎收看直观机械,今天我们来一起看一看步进电机的基本结构和原理。
在工业自动化中,步进电机的应用非常的广泛。例如工业机器人、3D打印机、计算机硬盘等都有步进电机的身影。步进电机的特殊性在于它可以控制转子的角度位置,而不需要传感器来控制位置,因此是一种开环控制系统。与直流无刷电机相似,他们都是通过控制线圈的通电时序,使磁铁之间产生相互作用的力来旋转。

根据步进电机的构造,可以分为永磁式、反应式和混合式3种。目前最常用的是混合式步进电机,因为它综合了永磁式和反应式的优点。我们先通过永磁式步进电机来了解一些其结构和控制原理,然后进一步了解反应式和混合式步进电机的结构和控制原理。

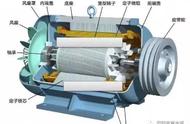
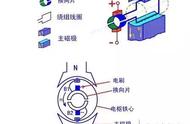
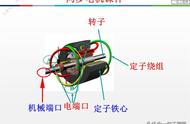
为了增大磁感应强度,减少涡轮损失,步进电机的转子和定子框架都是由高磁导率的硅钢片叠成。在定子框架上有4个定子齿,将其绕上两组线圈并通电后,根据电磁感应原理,此时线圈就变成了电磁铁。

根据右手定则,一端会变成N极一端会变成S极,这种极性的变化可以通过改变电源的正负极来实现转换。如果将电源的正负极转换加上一定的规律性,定子部分就行形成一个旋转的磁场,这样转子就会随着旋转的磁场而转动。而转子的转动有一个很重要的参数,那就是:步距角。步距角就是一个脉冲信号转子转过的角度,其计算公式为:360度除以括号转子齿数乘以运行拍数(永磁体齿数可以认为为1)。此步进电机的步距角为90度。