可编程序控制器(PLC)的应用中,我们常会碰到对继电器控制系统的改造问题,这时我们往往要参考原有的继电器控制电路来编制PLC的应用程序。因此,在编程时,我们应注意PLC控制系统与继电器控制系统工作方式上的一些不同。
1.扫描方式不同
我们看一个例子:一个继电器控制回路如图1所示。

因继电器控制系统是以“并行”方式工作的,而且其触点的通断需要一定的动作时间。所以当该电路起动后,时间继电器KT延时时间到时,KT是否能继续保持通电状态,需要同时考虑“并行”的两个动作过程:KT的常闭延时触点断开,KA1失电,KA1常开触点断开;KT的常开延时触点闭合,KA2得电,KA2常开触点闭合。这两个过程作用的结果,来决定KT的状态。同时,触点动作时间的存在,使得电路出现时序竞争。因此该电路不能可靠工作。如果加人虚框中的回路,并如图1把KA2的常开触点换成KA3的常开触点(见图1中括号)。结果是KT动作后,KT自身失电,就不会继续保持通电状态。
同样是这个电路,我们用PLC来实现,梯形图如图2所示。PLC是以“串行”方式工作的,也就是以扫描的方式,循环地、连续地、顺序地,逐条执行程序的方式工作。同时在PLC中,软触点的动作可认为是瞬时完成的,且其能把本次动作的结果记忆保持到下一次扫描运算时为止。即具有记忆保持功能。按这样一个顺序“串行”的工作方式,梯形图动作顺序如下:

当在某一扫描周期中T38延时到后,则:网络1中T38 常闭触点断开(OFF) Q0.0 OFF(无输出);网络2中T38常开触点闭合(ON),Q0.1 ON;网络3中Q0.0常开触点OFF,Q0.1常开触点ON,T38继续保持通电状态。而且不论我们在Q0.1与T38之间再加多少级前面继电器电路所加的虚框中的回路,并把Q0.1常开触点换成所加回路最后一级继电器的常开触点,T38仍能继续保持通电状态。
2.输入控制方式不同
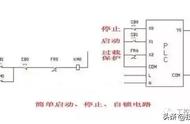
我们再看一个例子。大家都比较熟悉的电动机正反转控制电路,见图3。

在这个电路里面,启动按钮我们使用SB1、SB2的常开按钮,而停止按钮则使用的是SB3的常闭按钮。PLC程序里面也是这样设计的。(见图4)