重点是设计一个5自由度的工业机器人臂,通过基于改进遗传算法的HSPID控制器对速度性能进行进一步提升,并优化轨迹规划。GA是基于中演示的MIFF实施的,这提供了最大化响应时间的机会。
在通过运动部件组成的设计中实现高速性能,可以总结如下:轻松创建几何机器人部件以进行组装;对机器人臂进行建模和仿真;在上升时间、稳定时间和峰值超调方面尽量减少响应时间特性。
这可以增加将机械臂从初始状态点移动到最终状态点的速度,并显著降低循环时间。使用SolidWorks来设计机械臂的结构。然后通过插件式模型集成在Simscape兼容模型内设计控制器模型,最终导出文件,其中包括基座、肩部、上臂、下臂和腕部末端执行器的每个部件的结构。

所有部件都被组装在一起,使用Simscape块集在机器人的每个自由度上实施了一个HSPID控制器,以构建整个系统。最后对每个操作关节分别进行了上升时间、稳定时间和峰值超调的检查。
设计方法,包括建模Simscape配置、估计每个操作关节的传递函数、设计HSPID控制器以及运动检测策略。估计传递函数的仿真结果方法,有无控制器情况下设计模型的响应时间,以及基于三种不同轨迹信号的运动估计仿真结果方法。
过程设计方法学过程设计技术,包括建模、仿真和HSPID控制器。基本上,一个机器人臂由5个连杆和5个关节组成。为了验证系统级的设计和仿真模型,我们需要定义系统的结构和行为。

在这项工作中,使用基于插件的模型集成语义地定义了与Solidworks和Simscape相关的模型,以获得兼容的结构和可模拟的模型,导出这些模型到XML文件中。
3D CAD部件设计和装配可以使用SolidWorks与Matlab结合来设计高质量的控制系统,通过使用轴材料在机器人的运动研究中模拟机械部件的机械行为,提供了将所有组件参数转化为XML文件的能力,将物理结构的动态参数导入MATLAB环境,包括为每个操作关节进行的惯性矩阵计算,提供了一个令人惊叹的解决方案,可以绘制一个机械模型,以作为真实几何和质量测量的应用。
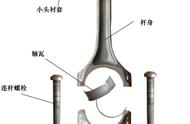
各个部件被单独构建,并且被串联地组装起来。机器人臂的所有设计刚体,从底座到末端标记为:基座、肩部、下臂、上臂、连接器、腕部和末端执行器。首先,需要将基座连接到机器人框架,将肩部连接到前臂,通过连接器将上臂连接到前臂,将腕部连接到两个刚性上臂。此外,末端执行器必须附在要操纵的物体上。

除了确定系统的尺寸参数,如体积、高度和重量,还应安装旋转关节的旋转。然后进行运动分析,以验证模型配置在速度和距离方面的有效性。因此,不同的参数和设置将导致不同的结果。
Simscape建模使用Simscape Multibody进行链接、关节和动态分析运动的模拟。3D实体模型包含机器人主体,一个操作关节被用于组装整个系统。此外,使用SimMechanics工具为每个刚性体生成XML文件。
地板块集被用作世界坐标系的参考框架,用于设置重力方向的刚性变换。为了调查运动参数和响应时间特性,使用范围模拟器进行此目的的仿真。说明了整个系统的Simscape模型,表示关节旋转和刚性部件如下:基座、肩部、下臂、连接器、上臂、腕部和末端执行器。