现在无人驾驶一般情况下,依赖的是高精度的地图,结合摄像头加激光雷达。
但是这些东西,光靠车子本身的数据处理,可能还不行,还得有一个数据处理中枢,而且这些方案,其实只能做到驾驶辅助,不能说是自动驾驶,尤其是对于某些场景,还具备很大的BUG。

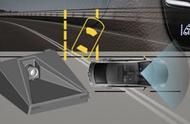
比如雷达对于禁止物体的探测,效果是没那么好的,同样的摄像头方案,对于光线或者是大雾,甚至很多扬尘路段,识别度也是没那么好。
这就是为什么这一次,小鹏的车子在驾驶过程中,识别不出前方的故障车,直接不减速怼上去了。

目前这些方案,所实现的只能算,L2级别的驾驶辅助功能,真的不能称之为自动驾驶。
前几年的宣传真的过于激进了,导致很多朋友被误导了,这种情况这几年稍微好一点,厂家宣传的时候稍微谨慎了点,但是大家在用车的时候,千万不要拿自己的生命开玩笑。

除了像特斯拉小鹏这种方案之外,目前像百度、小米包括华为都在做的一种方案,就是除了本地处理之外,还需要进行联网处理的方案。
李彦宏之前出过一本书,是关于智能交通方面的,里面说到一个重要的点,叫车路协同,比目前单纯的单车方案,确实要好一些的。