这种方案,就是所有在路上参与交通的终端,像汽车和其它的一些终端,包括路上的信号装置,都具备信号交互和传输的功能,车、路、物之间,能够互相感知对方的存在。
当然这是种比较理想的方案,而且这种方案离我们现在,确实还是比较远的。

目前像百度萝卜快跑,在驾驶位上已经实现了无人,但只是在特定改造过的路段,没有全域的开放。
喵哥上次体验萝卜快跑无人车的时候,驾驶位是坐了一个安全员的,而且喵哥发现安全员,做的最多的动作,就是按双闪。

因为无人驾驶汽车的反应,相对是比较灵敏,有时候可能出现,比较过激的一些反应。
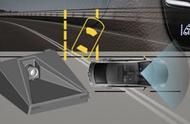
比如前方突然出现一个自行车,如果是人开车会逐渐减速,然后绕一下;但是无人车不会,它会减速甚至直接刹停,但不会绕一下,要等确定没有危险之后,才决定是否继续前进。

所以会出现直接刹停的情况,那么后面跟的车子,如果跟车距离比较近,反应不过来,就会撞上追尾了。
以目前国内的交通环境,要实现像李彦宏,在智能交通里面所描述,车路协同,车子自动开到楼下把你接了,把你送到火车站,然后车子自动开回来,真的还有很长的路要走。